
The BEHAVIOR Challenge at NeurIPS 2025 invites researchers to tackle long-horizon, everyday household tasks in realistic virtual home environments, supported by a large dataset of 10,000 richly annotated expert trajectories (over 1,200 hours) to advance robot planning and control in complex, human-centric settings.

About Me
I’m a Member of Technical Staff at OpenAI, working on robotics. Previously, I had the privilege of working with Prof. Fei-Fei Li and Prof. Jiajun Wu on the BEHAVIOR project at the Stanford Vision & Learning Lab, focusing on 3D robot simulation and dataset curation to advance robot learning.
News
[expand]- Dec. 2025 - Shared results from the 1st BEHAVIOR Challenge at NeurIPS 2025
- Nov. 2025 - Behind-the-scenes on the BEHAVIOR Challenge at BARS 2025
- Nov. 2025 - Featured in World Labs' official launch of Marble
- Oct. 2025 - Released MoMaGen
- Sep. 2025 - BEHAVIOR Challenge covered by Stanford HAI
- Sep. 2025 - Launched the 1st BEHAVIOR Challenge
- Aug. 2025 - BEHAVIOR Robot Suite (BRS) accepted at CoRL 2025
- Mar. 2024 - Full release of BEHAVIOR-1K presented at NVIDIA GTC 2024
- Jan. 2024 - Joined Stanford Vision and Learning Lab as Research Engineer
Research
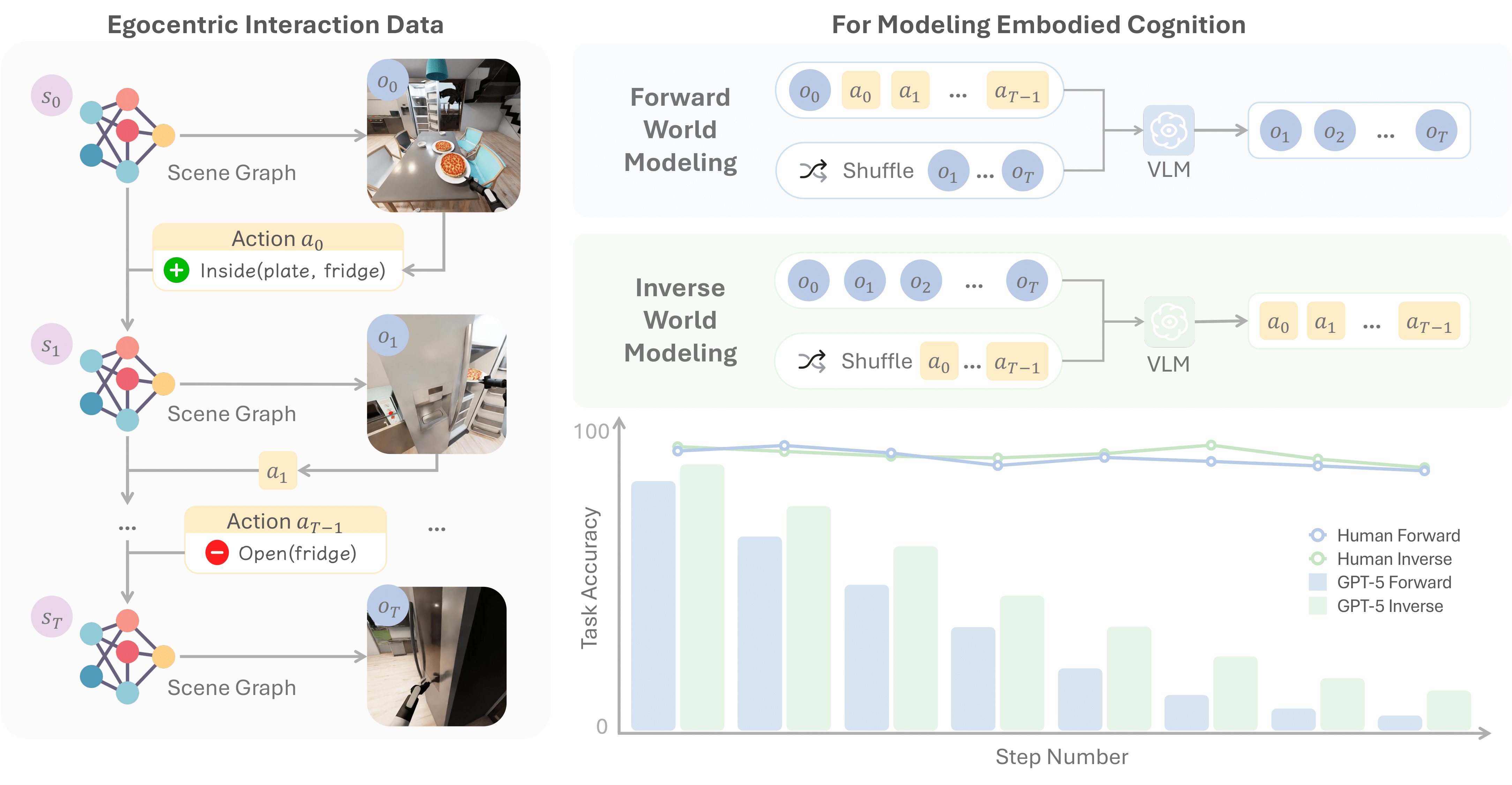
ENACT evaluates embodied cognition in vision-language models through forward and inverse world modeling tasks. Using 8,972 QA pairs from the BEHAVIOR challenge, it tests affordance recognition, action-effect reasoning, and long-horizon memory from egocentric observations.
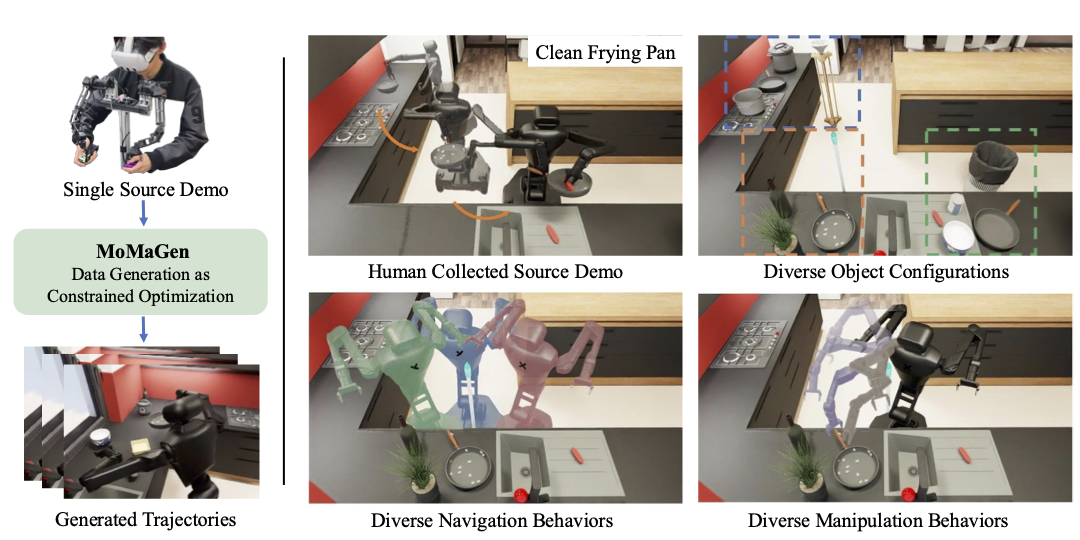
MoMaGen automatically generates diverse training datasets for bimanual mobile manipulation by solving constrained optimization problems that ensure robot reachability and camera visibility from minimal human demonstrations.
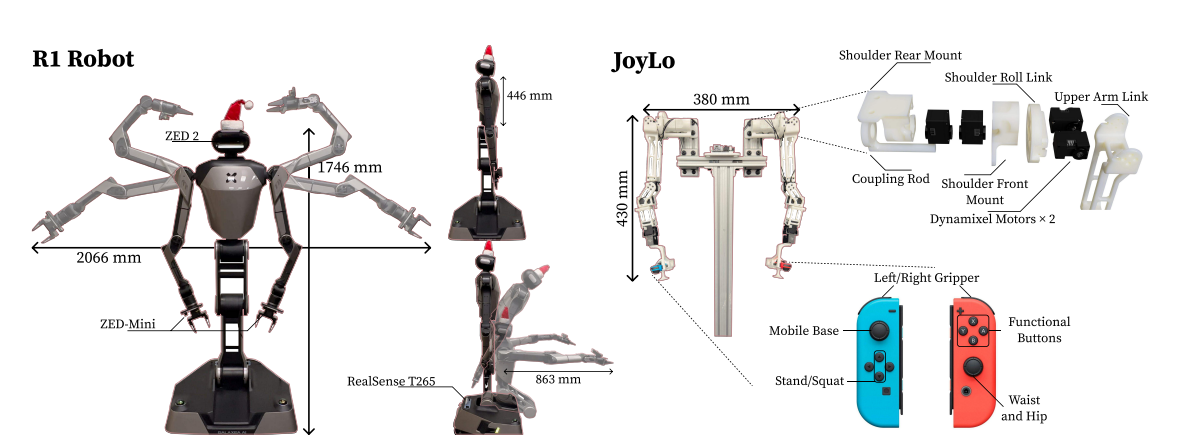
We introduce the BEHAVIOR Robot Suite (BRS) for household mobile manipulation, featuring a bimanual wheeled robot with 4-DoF torso that achieves critical capabilities in coordination, navigation, and reachability. Our framework includes a cost-effective teleoperation interface and novel algorithm for learning whole-body visuomotor policies.

BEHAVIOR-1K is a comprehensive simulation benchmark for human-centered robotics with 1,000 real-world tasks. Powered by NVIDIA's Omniverse, it features diverse scenes, objects, and activities with realistic rendering and physics simulation. This benchmark aims to advance embodied AI and robot learning research.
Professional Experience
 |
OpenAI 01/2026 - Present Member of Technical Staff |
 |
Stanford AI Lab 01/2024 - 01/2026 Software Developer 2 |
 |
Johnson & Johnson 06/2023 - 09/2023 Robotics & Controls |
Education
 |
Northwestern University 09/2022 - 12/2023 M.S. in Robotics |
|
Northwestern University 09/2019 - 06/2022 B.S. with honors in Computer Science, summa cum laude |
Past Projects
Working with Northwestern's Omnid Mocobots—mobile platforms designed for collaborative payload transport—this project implemented and compared two imitation learning approaches: Action Chunking with Transformers (ACT) and Diffusion Policy. The work involved building a complete ROS2 data infrastructure, migrating legacy code from ROS1, integrating ros2_control, collecting human demonstrations with multi-camera setups, and deploying visuomotor policies that predict assistive forces to reduce human effort during co-manipulation tasks.
A multimodal system combining voice interaction, vision, and manipulation for robot-assisted cooking. Users give natural language commands through Alexa, which are processed by an LLM to generate recipe steps. The system uses CLIP for zero-shot object recognition, MediaPipe with LSTM for hand gesture detection to coordinate human-robot handoffs, and MoveIt for motion planning.
Built a complete EKF-SLAM system from first principles in C++ without relying on existing libraries. The system simultaneously estimates robot pose and builds a map of landmark features, using custom data association algorithms for landmark matching, tuned process and measurement noise models, and RViz visualization.
The system uses custom OpenCV algorithms to detect the tower structure and identify removable blocks, MoveIt for collision-free motion planning in tight spaces, and a fine-tuned MobileNet to detect when human hands enter the workspace for safe turn-taking. The project required integrating perception, planning, and contact-rich manipulation for the Franka Emika Panda arm.
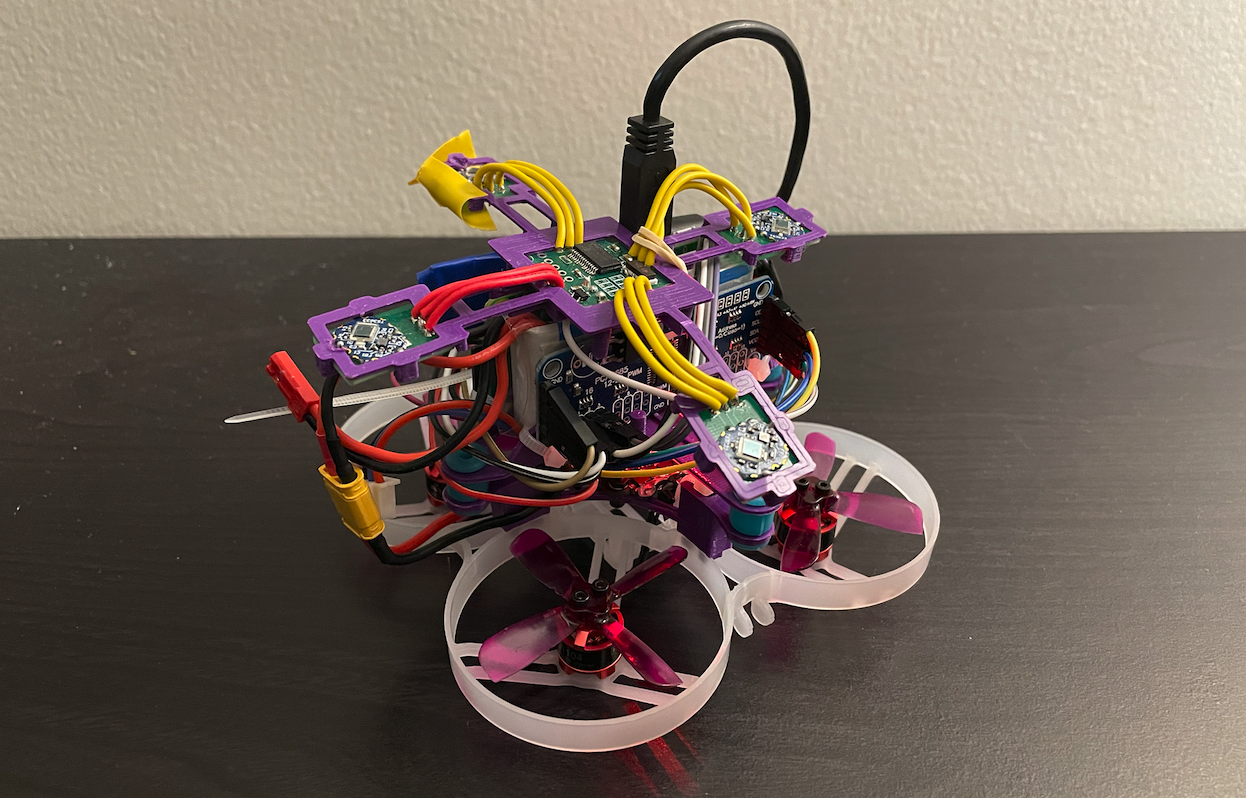
Designed and built a quadrotor from scratch, including airframe design, sensor integration, and flight control software. The system fuses IMU data through a complementary filter to estimate orientation, implements cascaded PID controllers for stable flight, supports joystick teleoperation with safety limits, and integrates HTC Vive Lighthouse for precise 3D positioning to enable autonomous waypoint navigation.
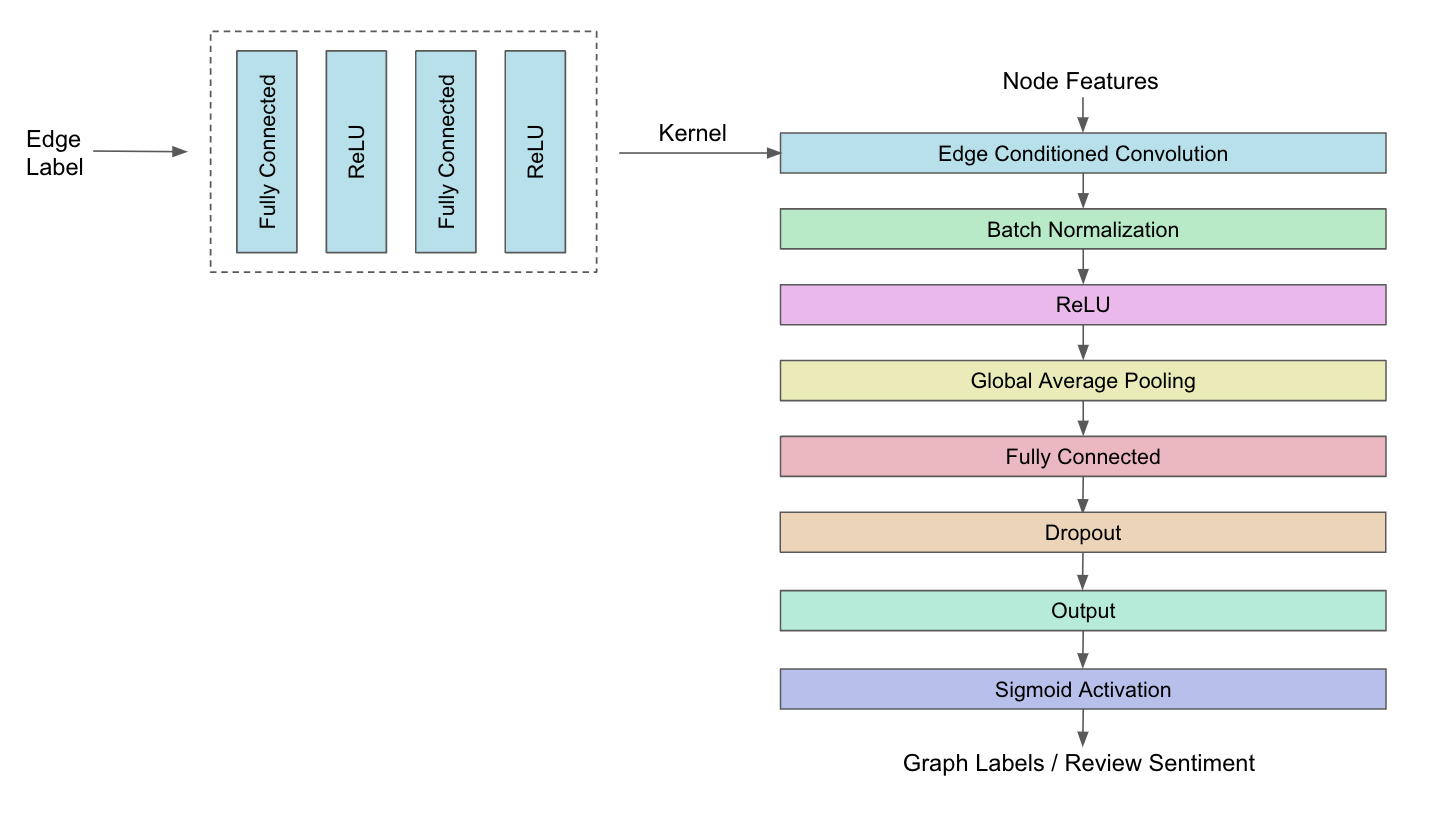
Combined dependency parsing with edge-conditioned graph convolutional networks for sentiment classification. By representing sentences as dependency graphs and learning on this structure, the model achieved 87.36% accuracy on IMDB sentiment analysis while using fewer parameters than transformer baselines.
Implements feedforward-plus-feedback control for a KUKA youBot—a 5-DOF arm mounted on a mecanum-wheeled base. The project developed trajectory planning algorithms that exploit the mobile base's omnidirectional capabilities to improve reachability and implemented odometry-based simulation to validate the control approach before hardware deployment.

A line-following motorcycle that won 'Best Design' at the 2023 Northwestern Tech Cup. A Raspberry Pi Pico W processes camera images to detect line position, a PIC32 microcontroller handles real-time servo control for steering, and custom-designed PCBs integrate power management and motor control.
Implemented two distributed control algorithms that create emergent behaviors from simple local rules. The first mimics the Brazil nut effect to spatially segregate robots by size without centralized coordination. The second replicates Reynolds' flocking behavior—separation, alignment, and cohesion—to produce bird-like group movement. Each robot runs identical control code and makes decisions based only on nearby neighbors.
Created the 'IMUGripulator'—a 2-DOF robotic arm system combining IMU-based joint control and EMG-based gripper actuation. Tilt sensors on a wearable IMU control shoulder and elbow joints, while muscle activation signals trigger gripper open/close. Built with micro:bit v2 microcontrollers and programmed in C.
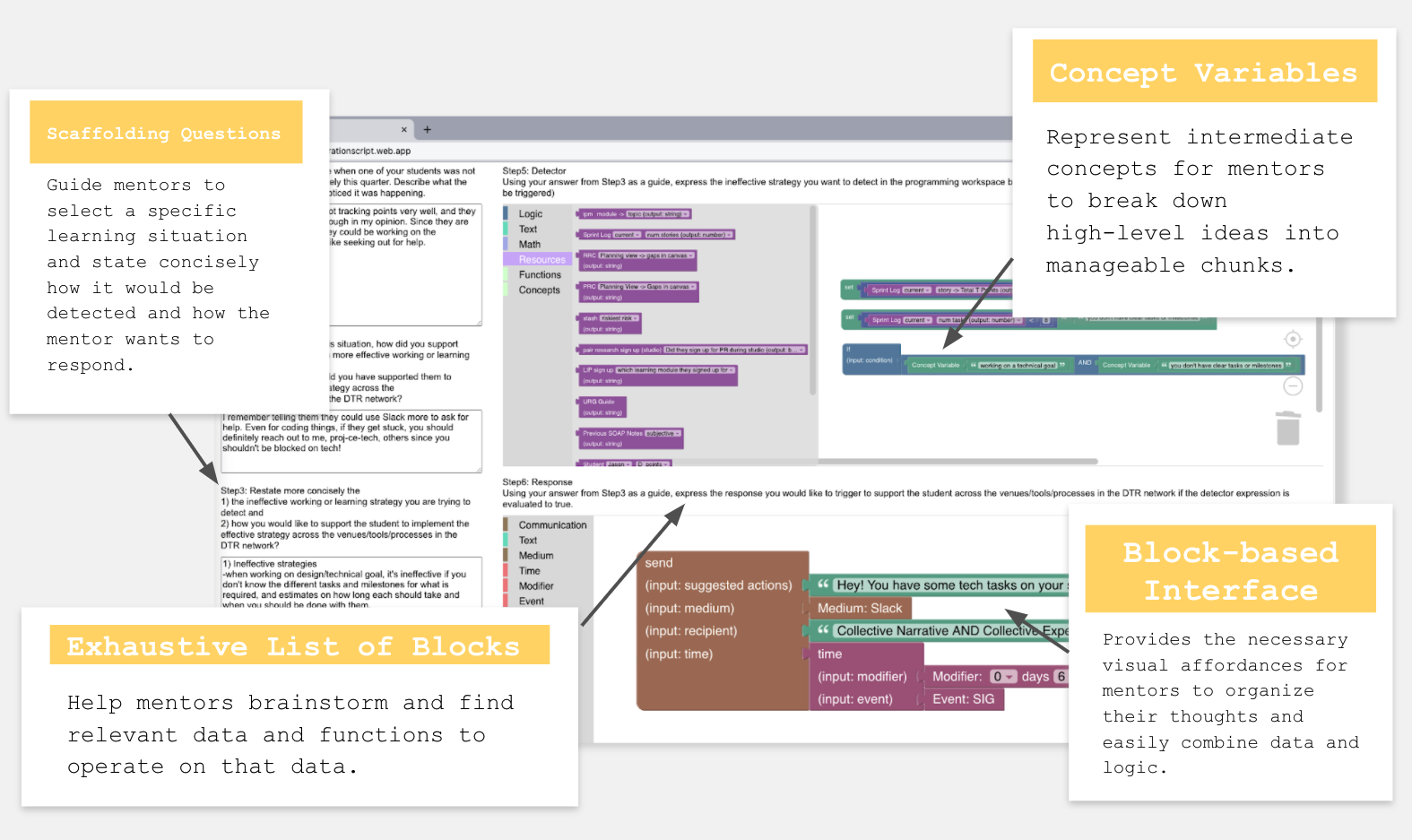
A research platform that models organizational workflows as computational abstractions. The system detects workplace situations through various sensors and APIs, then delivers context-appropriate collaboration strategies by representing processes, team structures, physical spaces, and tools as programmable entities. Built with React and Node.js.
Implemented a physics simulator for a dice bouncing inside a spinning cup—a 6-DOF system involving rigid body dynamics, contact mechanics, and collision detection. Using Lagrangian mechanics and SymPy for symbolic derivation, the simulator handles corner-edge collisions between the dice and cup walls while maintaining energy conservation.