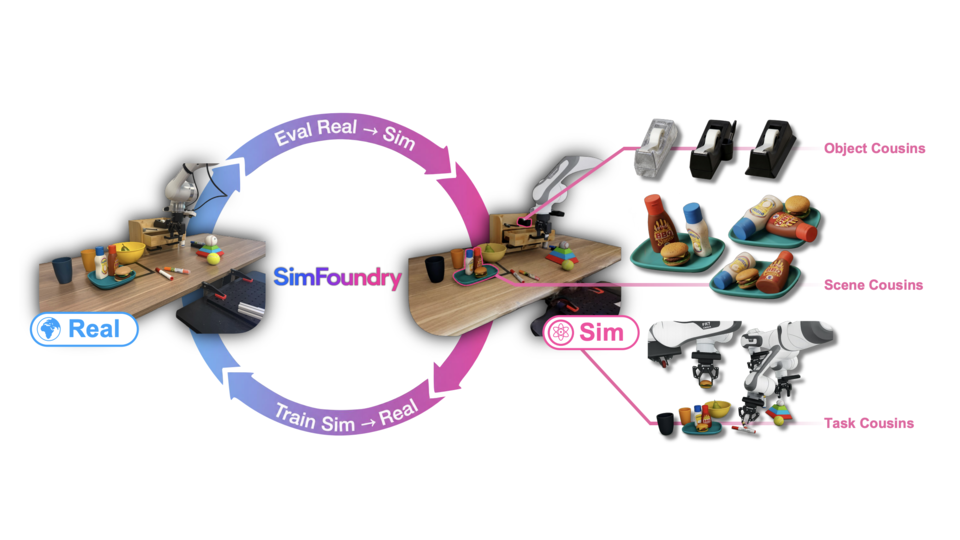
A modular real-to-sim pipeline that turns a single real-world scene video into interactive simulation environments for scalable policy training and evaluation.
I am a Member of Technical Staff at OpenAI. Previously, I worked with Prof. Fei-Fei Li and Prof. Jiajun Wu on the BEHAVIOR project at the Stanford Vision & Learning Lab, focusing on 3D robot simulation and datasets for robot learning.

A modular real-to-sim pipeline that turns a single real-world scene video into interactive simulation environments for scalable policy training and evaluation.
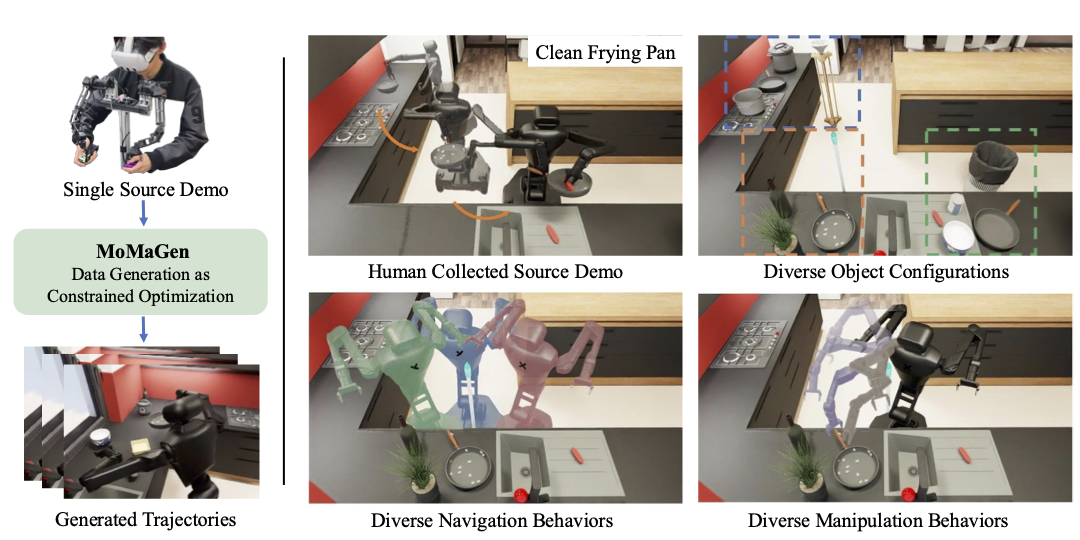
A demonstration generation method for bimanual mobile manipulation using constrained optimization for reachability and camera visibility.
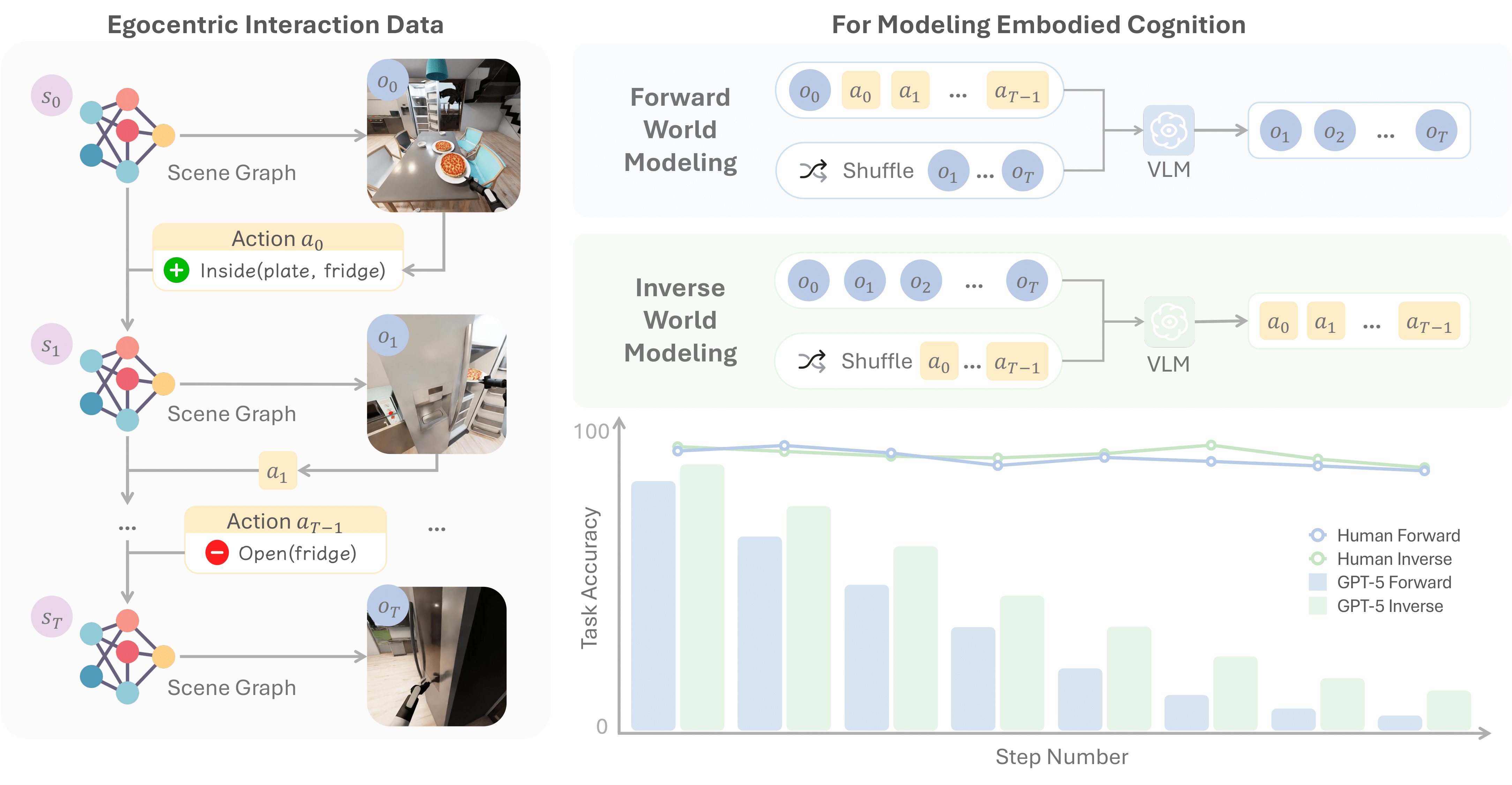
Forward and inverse world-modeling tasks for VLMs using 8,972 QA pairs from the BEHAVIOR Challenge.

A benchmark and dataset with 10,000 richly annotated expert trajectories across realistic virtual home environments for long-horizon household robotics.
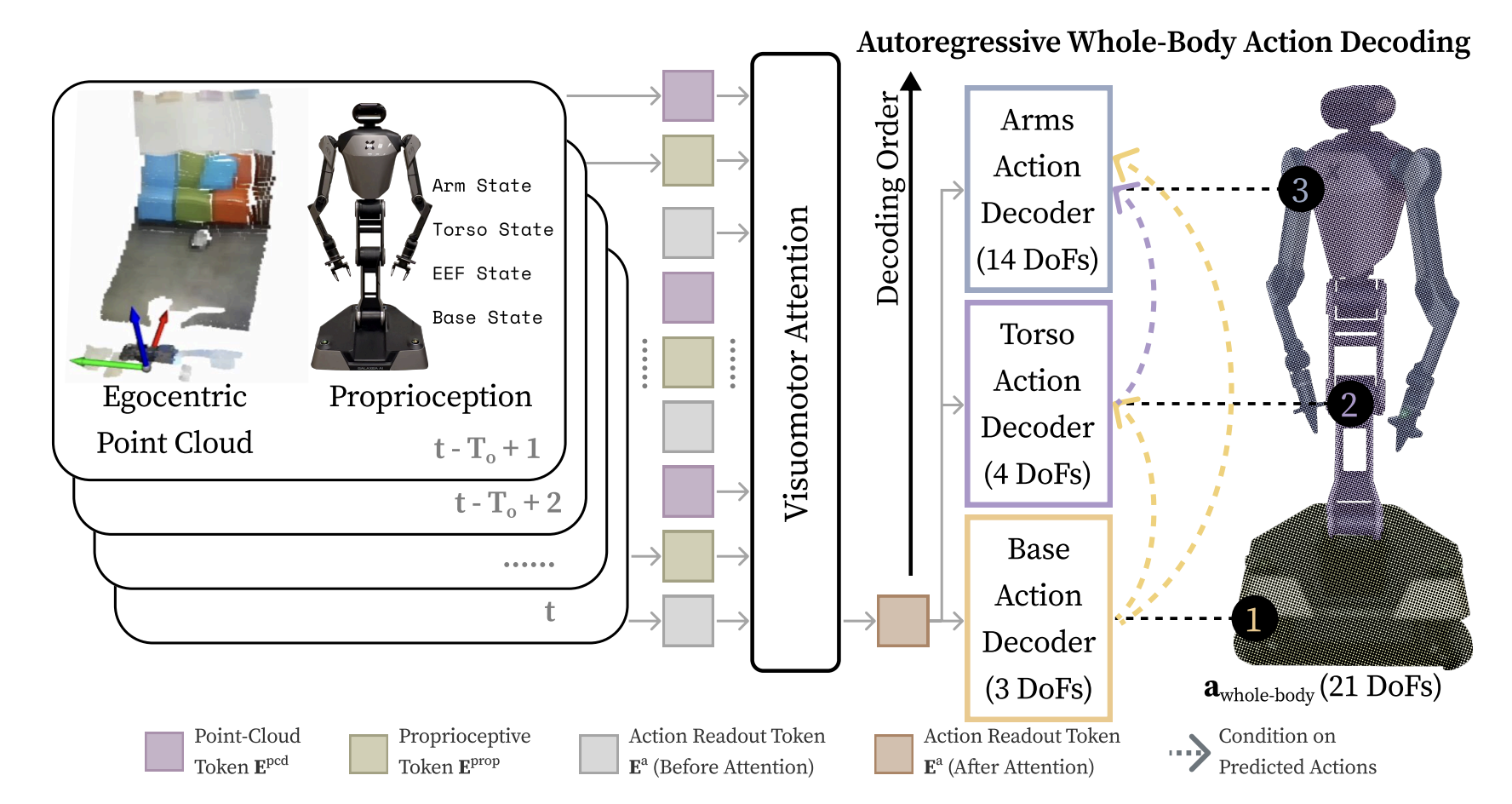
A real-world whole-body manipulation stack with a bimanual wheeled robot, a teleoperation interface, and visuomotor policy learning.

A human-centered embodied AI benchmark with 1,000 everyday activities in realistic simulation.
01/2026 - PresentMember of Technical Staff

01/2024 - 01/2026Research Engineer

06/2023 - 09/2023Robotics & Controls

09/2022 - 12/2023M.S. in Robotics
09/2019 - 06/2022B.S. with honors in Computer Science, summa cum laude
Imitation-learning policies for collaborative mobile manipulation with Omnid robots.
A robot-assisted cooking system that turns spoken instructions into perception and manipulation actions.
A mapping and localization project for estimating robot pose and landmarks in simulation.
A robot arm system for detecting, planning, and executing Jenga moves with safe turn-taking.
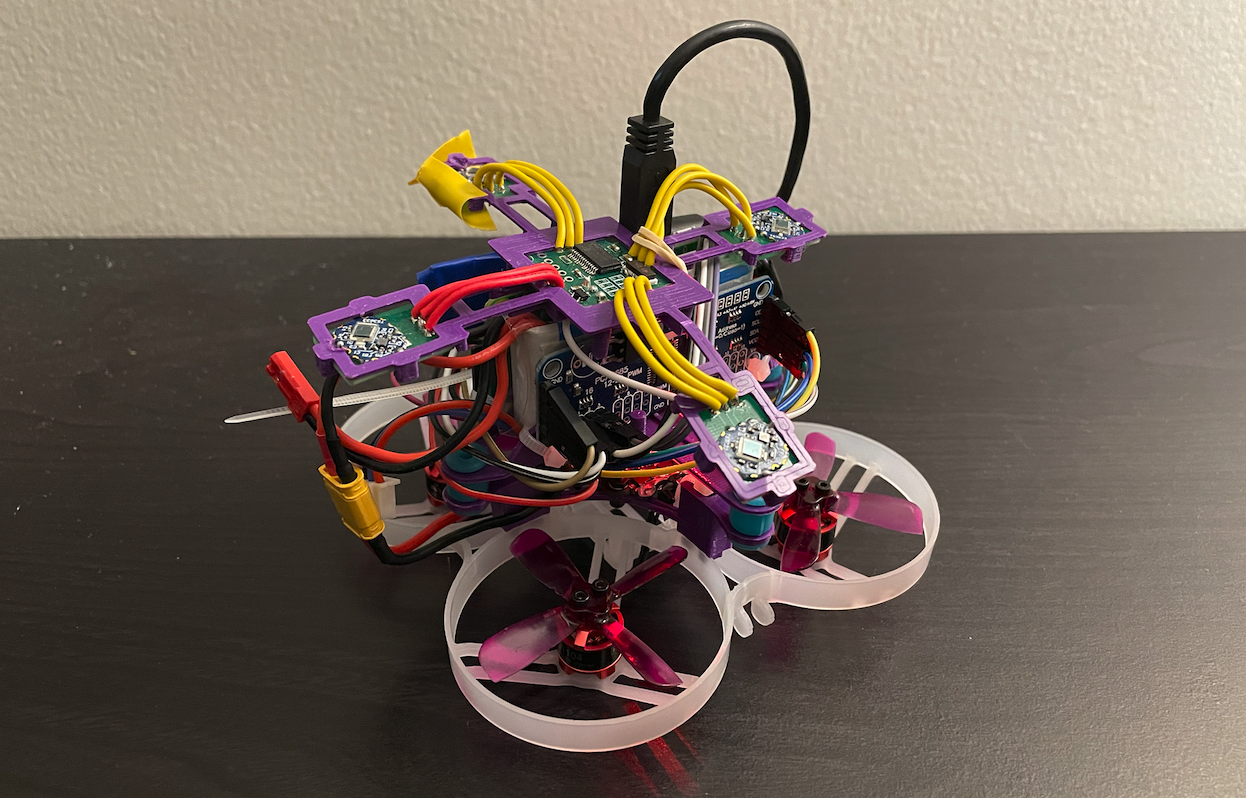
A custom quadrotor platform for stable flight control and motion tracking.
Trajectory planning and control for a mobile manipulator across pick-and-place style motions.

A camera-guided line-following motorcycle built around custom steering control.
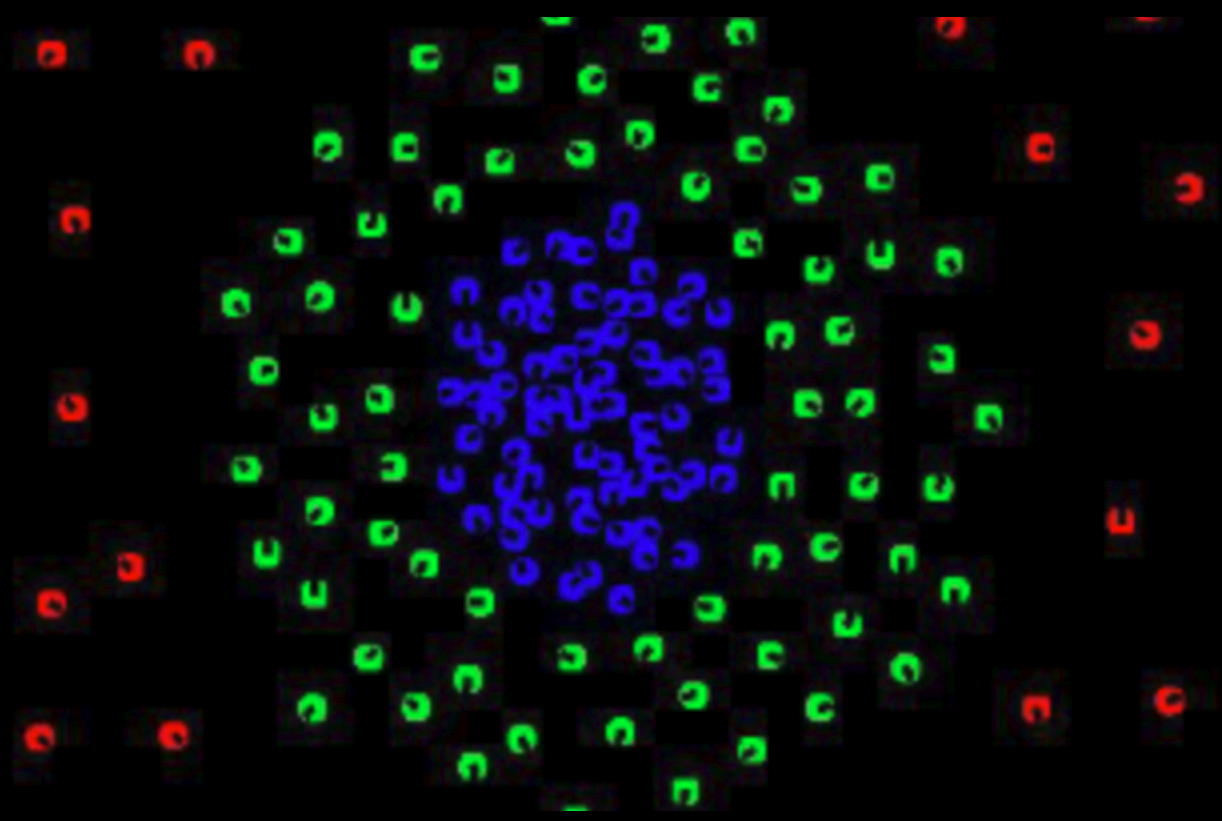
Distributed simulations for spatial sorting and flocking behavior.
A wearable-controlled robotic arm and gripper for gesture-based manipulation.
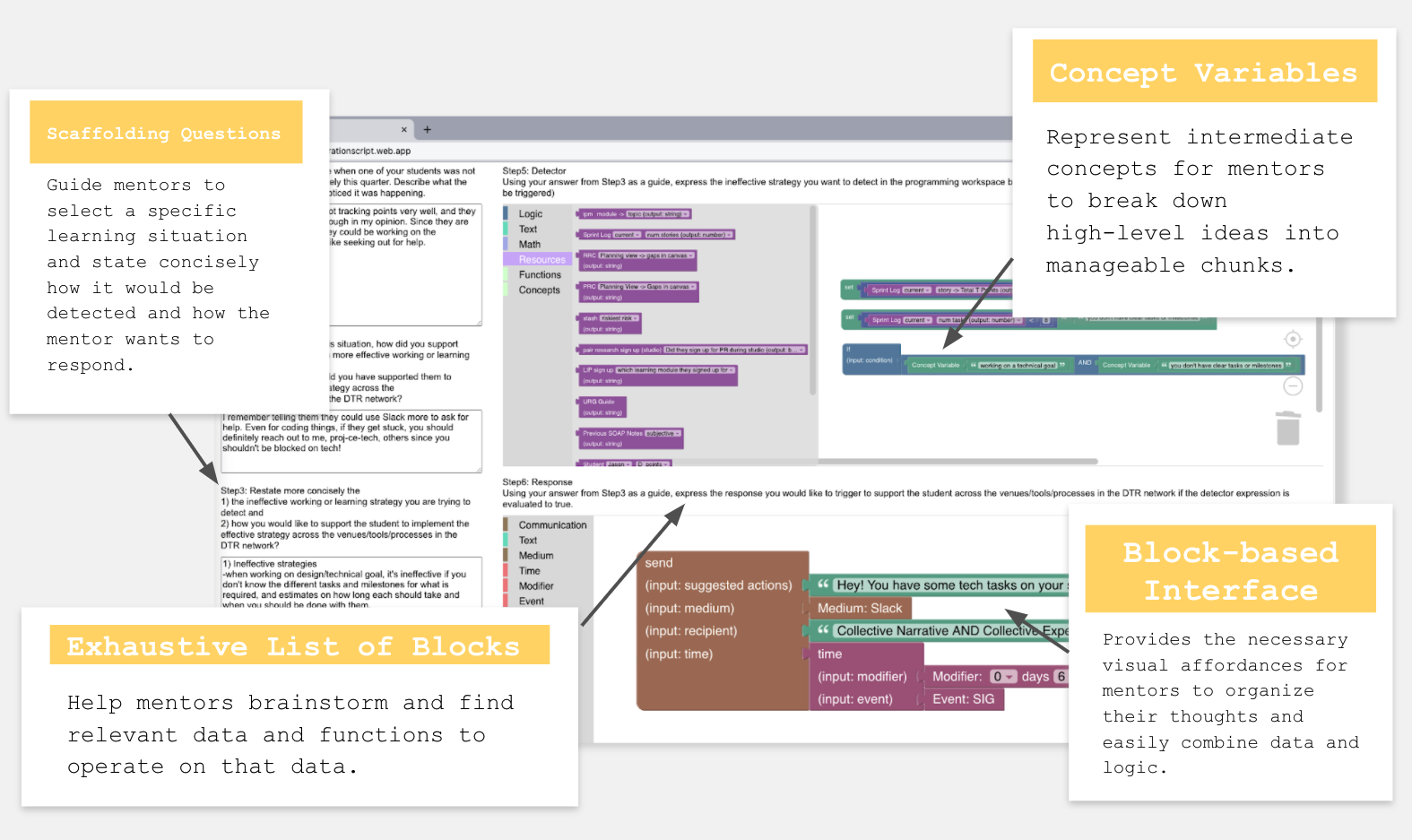
A web research system for modeling collaboration strategies as executable workflows.
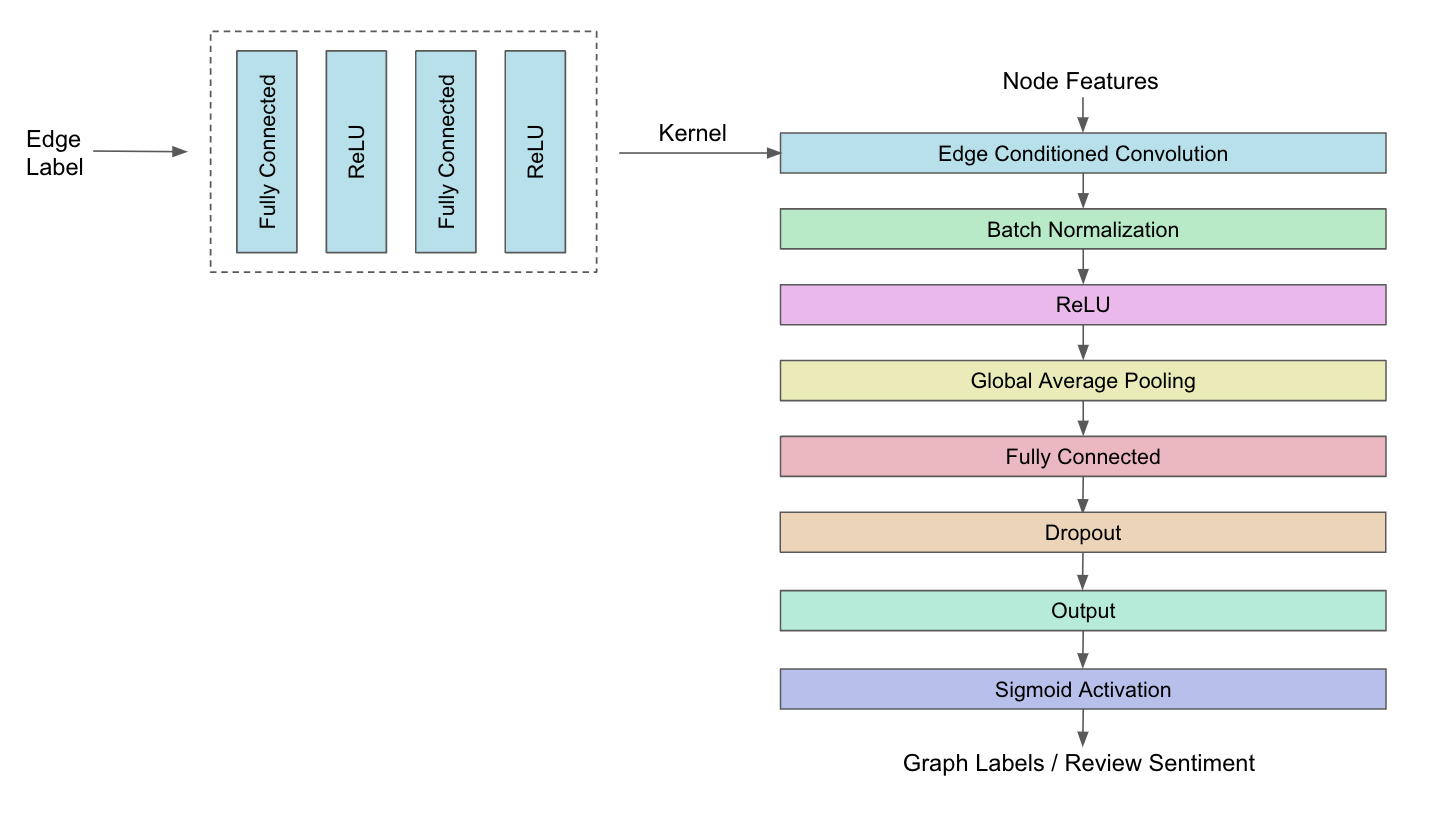
A graph-based sentiment model over sentence structure.
Rigid-body contact simulation for modeling dice-in-cup dynamics.